The ErgoBot is a unique rolling physics laboratory apparatus that provides real-time sensing of position, velocity, and acceleration.
Ergopedia's mission is to develop educational technologies and integrate them into innovative and effective curricula. The ErgoBot is an example of an educational technology that was developed at Ergopedia and integrated into the Essential Physics curriculum.
The ErgoBot was designed to illustrate and enhance instruction in many content areas of kinematics: position, velocity, and acceleration in the equations of motion; energy and power; transformation from potential to kinetic energy; and the force due to gravity. It was also designed to augment instruction in mathematics, such as for vectors and geometry. Finally, it was designed as the platform for students to engage in open inquiry through engineering design projects that build on the apparatus.
The design of the ErgoBot was subject to a number of constraints: robustness for handling by teenagers; ease-of-use; flexibility so that it can be used for many investigations; cost-effectiveness; compatibility with the curriculum; and potential to be broadly applicable across the STEM disciplines.
Ergopedia's mission is to develop educational technologies and integrate them into innovative and effective curricula. The ErgoBot is an example of an educational technology that was developed at Ergopedia and integrated into the Essential Physics curriculum.
The ErgoBot was designed to illustrate and enhance instruction in many content areas of kinematics: position, velocity, and acceleration in the equations of motion; energy and power; transformation from potential to kinetic energy; and the force due to gravity. It was also designed to augment instruction in mathematics, such as for vectors and geometry. Finally, it was designed as the platform for students to engage in open inquiry through engineering design projects that build on the apparatus.
The design of the ErgoBot was subject to a number of constraints: robustness for handling by teenagers; ease-of-use; flexibility so that it can be used for many investigations; cost-effectiveness; compatibility with the curriculum; and potential to be broadly applicable across the STEM disciplines.
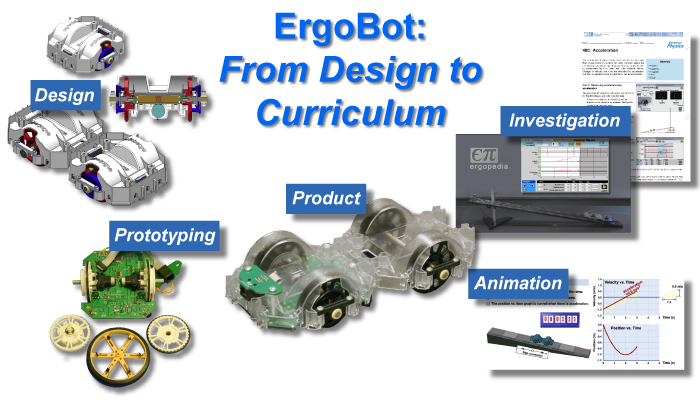
ErgoBot shows Ergopedia's design process
The ErgoBot is an illustration of the Ergopedia design process from beginning to end:
Problem: Students have difficulty understanding the differences between position, velocity, and acceleration when studying the equations of motion.
Solution: Design an apparatus that students can move around and see real-time graphical plots of its position, velocity, and acceleration.
Technology: Ergopedia designed, developed, and prototyped the ErgoBot apparatus, developed the ErgoDAQ as a data acquisition interface, and created customized data acquisition and graphing applications using the LabVIEW package.
Curriculum: Ergopedia produced animations, laboratory investigations, and videos to integrate the technology into the instruction of kinematics in several chapters of Essential Physics.
The ErgoBot is an illustration of the Ergopedia design process from beginning to end:
Problem: Students have difficulty understanding the differences between position, velocity, and acceleration when studying the equations of motion.
Solution: Design an apparatus that students can move around and see real-time graphical plots of its position, velocity, and acceleration.
Technology: Ergopedia designed, developed, and prototyped the ErgoBot apparatus, developed the ErgoDAQ as a data acquisition interface, and created customized data acquisition and graphing applications using the LabVIEW package.
Curriculum: Ergopedia produced animations, laboratory investigations, and videos to integrate the technology into the instruction of kinematics in several chapters of Essential Physics.
Watch the ErgoBot in operation
|
Mouse-over to start the animation
|
Students use the ErgoBot for engineering projects
When switched to computer-controlled drive mode, the Ergobot can turn on a millimeter to navigate mazes by vector. When combined with powerful LabView software, the ErgoBot makes physics and engineering real because students have real challenges.
For example, one investigation allows the students a budget of exactly 10 joules of energy. They have to design a force vs. time curve to move the 450-gram ErgoBot 20 meters while making several turns. The have to use physics to solve a realisting engineering problem. This is precisely the kind of learning that has been suggested by the National Academy as necessary for America's future competitiveness.
When switched to computer-controlled drive mode, the Ergobot can turn on a millimeter to navigate mazes by vector. When combined with powerful LabView software, the ErgoBot makes physics and engineering real because students have real challenges.
For example, one investigation allows the students a budget of exactly 10 joules of energy. They have to design a force vs. time curve to move the 450-gram ErgoBot 20 meters while making several turns. The have to use physics to solve a realisting engineering problem. This is precisely the kind of learning that has been suggested by the National Academy as necessary for America's future competitiveness.
About the ErgoBot
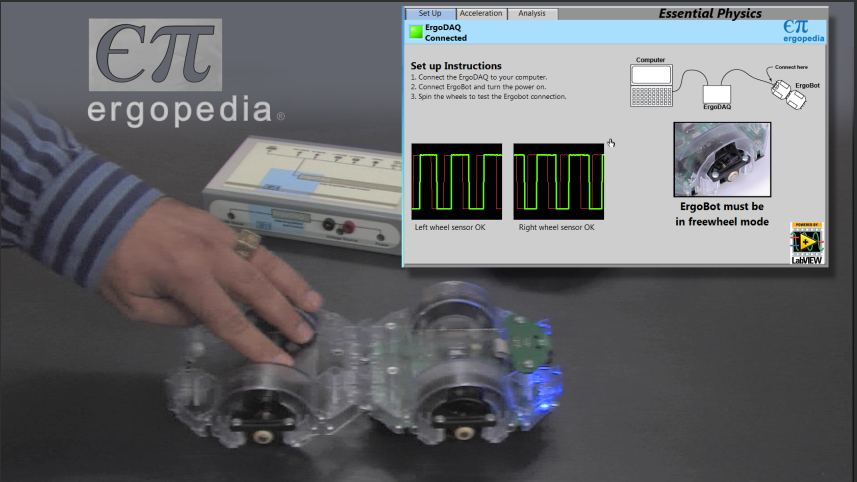
The ErgoBot has two modes for operation: free-wheeling mode and computer-controlled drive mode. When it is free-wheeling, students can move the ErgoBot around on a table or floor and watch the motion in real-time on the computer. In computer-controlled drive mode, students will use the LabVIEW interface on the computer to generate commands for the ErgoBot, causing it to move forwards, backwards, or stop.
The ErgoBot is constructed in two sections--front and back--that are easily detached from each other. When detached, the two-wheeled, powered end of the ErgoBot can move in any direction--forward, backwards, or turn left and right.
The ErgoBot is independently powered by an on-board, rechargeable lithium-ion battery; it is recharged by plugging it into a standard 18V DC power supply. Its control and data acquisition are through a standard RJ45 ethernet (or LAN) plug that connects into the ErgoDAQ data acquisition interface. On the underbody is an on-off switch. The ErgoBot switches between free-wheeling and drive modes by pulling out (or pushing in) a ring on each wheel.
The ErgoBot is currently being field tested in Delaware as part of the Essential Physics curriculum through a partnership with the Delaware Department of Education and the Delaware Science Coalition.
The ErgoBot has two modes for operation: free-wheeling mode and computer-controlled drive mode. When it is free-wheeling, students can move the ErgoBot around on a table or floor and watch the motion in real-time on the computer. In computer-controlled drive mode, students will use the LabVIEW interface on the computer to generate commands for the ErgoBot, causing it to move forwards, backwards, or stop.
The ErgoBot is constructed in two sections--front and back--that are easily detached from each other. When detached, the two-wheeled, powered end of the ErgoBot can move in any direction--forward, backwards, or turn left and right.
The ErgoBot is independently powered by an on-board, rechargeable lithium-ion battery; it is recharged by plugging it into a standard 18V DC power supply. Its control and data acquisition are through a standard RJ45 ethernet (or LAN) plug that connects into the ErgoDAQ data acquisition interface. On the underbody is an on-off switch. The ErgoBot switches between free-wheeling and drive modes by pulling out (or pushing in) a ring on each wheel.
The ErgoBot is currently being field tested in Delaware as part of the Essential Physics curriculum through a partnership with the Delaware Department of Education and the Delaware Science Coalition.
